Образ для Raspberry Pi
Образ RPi для Клевера включает в себя все необходимое ПО для удобной работы с Клевером и программирования автономных полетов. Платформа Клевера основана на операционной системе Raspbian и популярном робототехническом фреймворке ROS. Исходный код сборщика образа и всех дополнительных пакетов доступен на GitHub.
Использование
Начиная с версии v0.22, образ основан на ROS Noetic и использует Python 3. Если вы хотите использовать ROS Melodic и Python 2, используйте версию v0.21.2.
Скачайте последний стабильный релиз образа — v0.24.
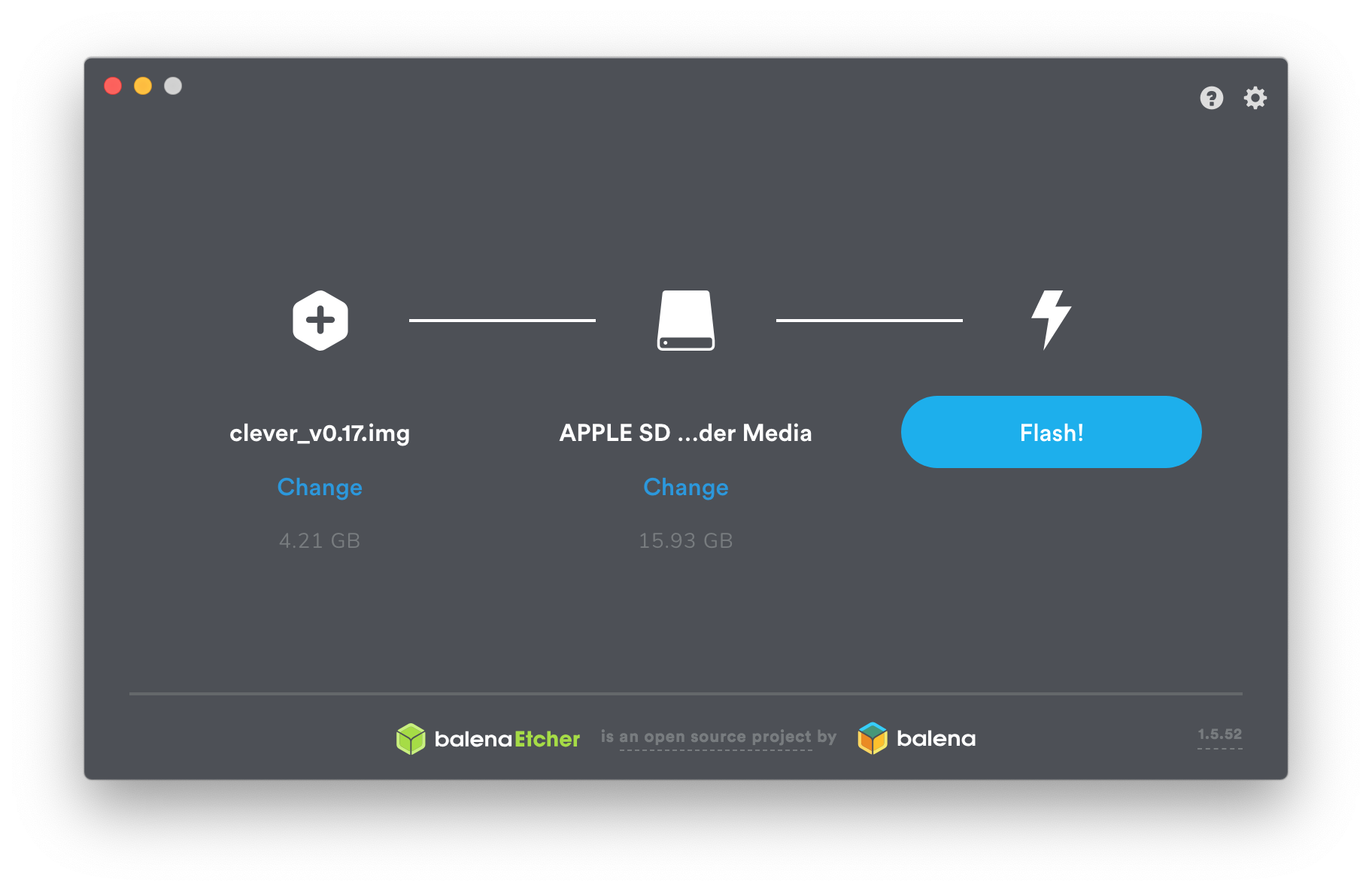
Скачайте и установите программу для записи образов Etcher (доступна для Windows/Linux/macOS).
Установите MicroSD-карту в компьютер (используйте адаптер при необходимости).
Запишите скачанный образ на карту, используя Etcher.
Установите карту в Raspberry Pi.
После записи образа на SD-карту, вы можете подключаться к Клеверу по Wi-Fi, использовать беспроводное соединение в QGroundControl, получать доступ по SSH и использовать остальные функции. При необходимости узнать версию записанного на карту образа используйте утилиту selfcheck.py.
Last updated